
 产品:31
产品:31
 联系我们
联系我们

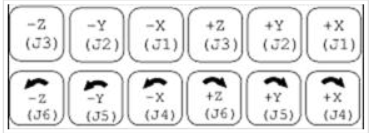
JOINT(关节坐标)可使工业机器人进行轴坐标运行,可分别对J1,J2,J3,J4,J5,J6进行旋转。
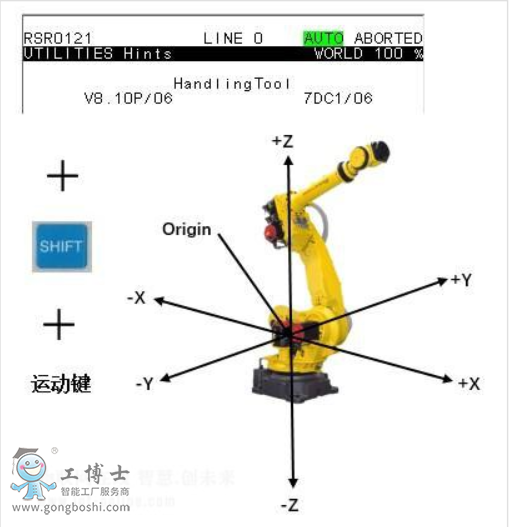
JGFRM(手动坐标)、WORLD(全局坐标)、USER(工作坐标),在用户自定义坐标系前,这三种坐标位置与方向完全重合。
TOOL(工具坐标)为工业机器人工具坐标系。
FANUC工业机器人手动示教的方法
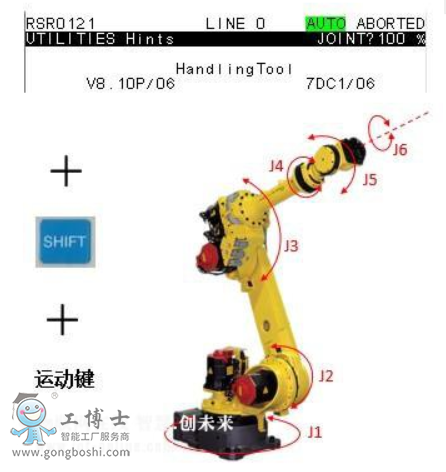
图1
FANUC工业机器人手动示教的方法
FANUC工业机器人手动示教的方法
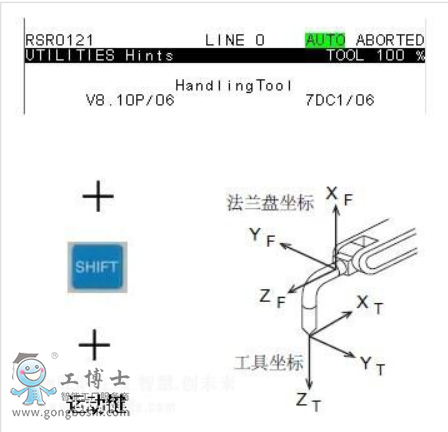
图3
FANUC工业机器人手动示教的方法
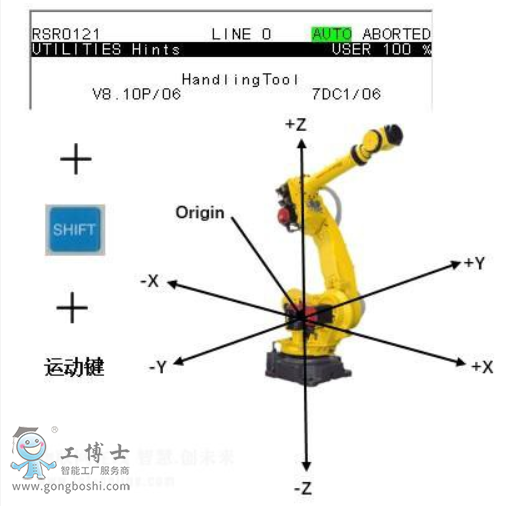
图4
2. 点动机器人
点动机器人的条件:
(1)示教器MODE SWITCH模式开关为:T1/T2。
(2)示教器ON/OFF开关为:ON。
(3)在示教器中选择所需要的坐标。
(4)按住示教器【DEAD MAN】(任意一个)。
(5)按住示教器【SHIFT】(任意一个)。
以上条件都满足的情况下,按住任意一个运动键(图5),就可以点动工业机器人了。
FANUC工业机器人手动示教的方法
更多点击发那科机器人